Past Research Projects
4WS Control
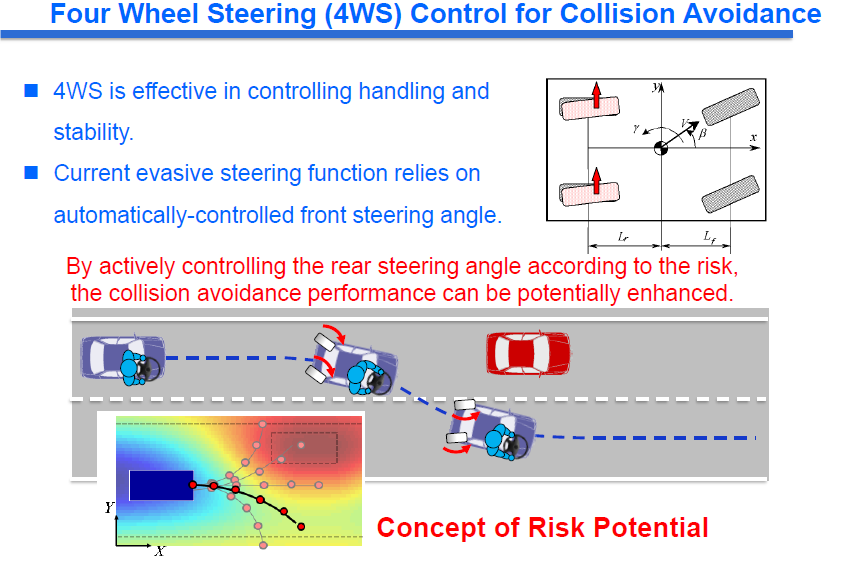
Conventional automated steering control functions for lane keeping and collision avoidance (evasive maneuver) rely on front steering angle control.
However, controlling rear steering angle also contributes to enhancement in handling and active safety without strong interference with human driver operation.
This study investigates the effectiveness of utilizing rear steering angle control in the context of active safety in lane change situation for obstacle avoidance by computer simulation as well as the driving simulator experiment.
EV Motion Control
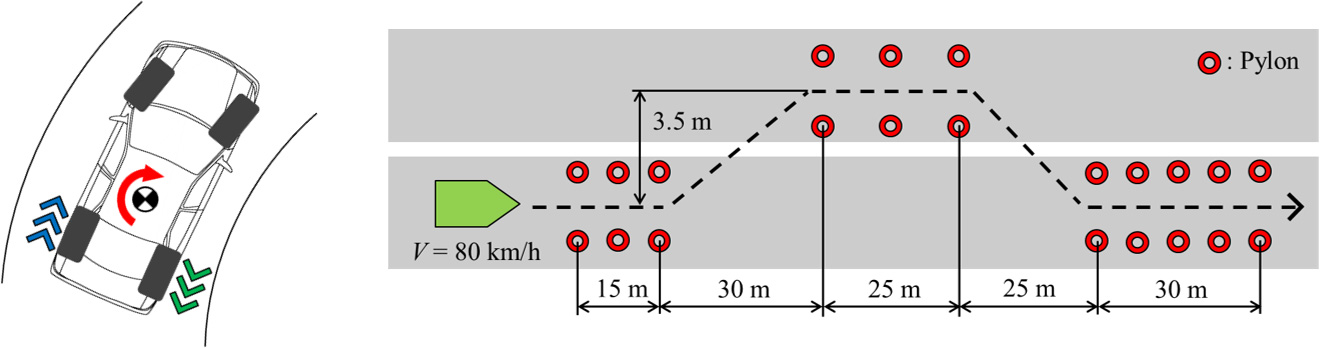
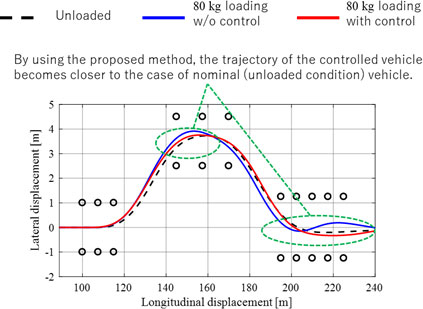
Enhancing Handling and Stability of Load-Sensitive Electric Vehicle by In-Wheel-Motor Torque Distribution Control
From the viewpoint of energy-efficient vehicles and emission problems, lightweight electric vehicles are expected to be spread. However, lightweight electric vehicles are sensitive to loading condition and tend to make drivers control the vehicle in more difficult manner. As a lightweight electric vehicle equipped with in-wheel motors which can independently control each drive wheel torque, Direct Yaw-moment Control (DYC) is effective as a method for improving handling and stability. This research proposes DYC to compensate the changes in the vehicle handling dynamics due to variation in loading conditions. The DYC system is composed of a feedforward of the steering angular velocity and a feedback of the yaw rate. Experiments on the double-lane-change test with a driving simulator were conducted to verify the effectiveness of the proposed DYC system.
Virtual Repulsive Force Field
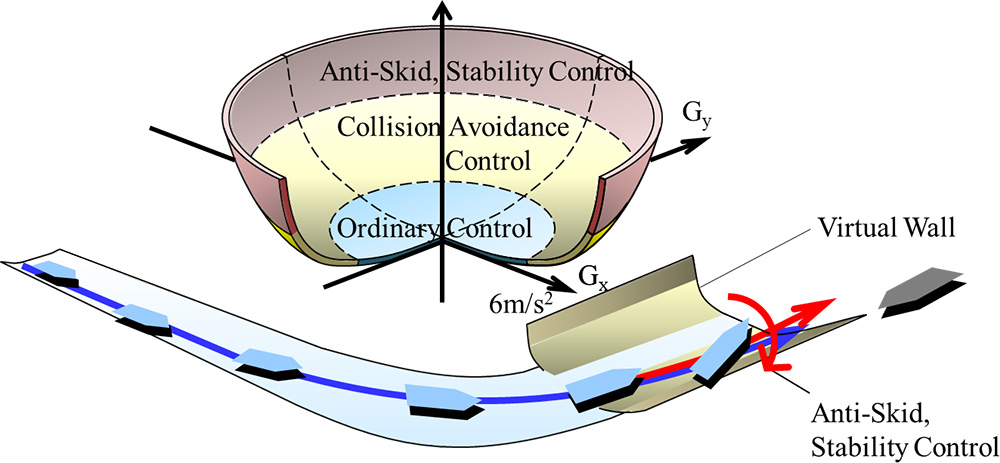
Collision Avoidance Control Based on Virtual Repulsive Force Field
Advanced driver assistance systems and autonomous driving systems are being enhanced to deal with various types of collision use-cases. To handle those complicated scenarios, the rational and understandable integrated vehicle control algorithm on a 2D planar motion is required. Here, a new 2D motion control methodology assuming virtual repulsive force generated from obstacles is introduced. The use-case functions are the lane departure prevention vehicle control and the forward obstacle avoidance. The simulation is conducted in various driving situations not only for single lane change for the forward obstacle avoidance but also for the case of arbitrary approach angle with respect to direction towards obstacles. Assuming virtual repulsive force field, the collision avoidance path can be calculated as the combination of two parabolic curves and the control activation points also can be calculated analytically.

Potential Risk Prediction
Vehicle Dynamics Control for Collision Avoidance in Intersections
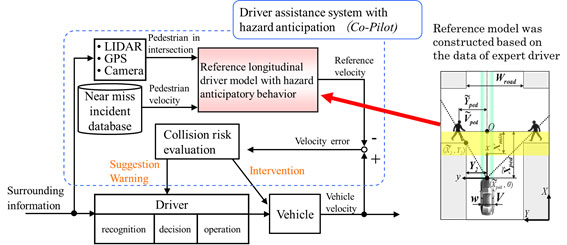
Risk Predictive Driver Model in Unsignalized Intersections for Preventing Pedestrian Accidents
Risk prediction relevant to pedestrians darting out to roadways is a promising key technology to reduce the number of crashes with pedestrians in unsignalized intersections. The goal of this research is to develop an advanced driver assistance system for preventing crashes with pedestrians in unsignalized intersections by considering knowledge in risk prediction. The reference longitudinal driver model with risk predictive driving behavior is constructed based on the driving data of driving instructors recorded by the continuous logging drive recorder. The driver speed control model is embedded in the proposed driver assistance system and the effectiveness of the driver assistance system is verified.
- A Part of the results of this research received the 64th JSAE Asahara science award at the 2014 JSAE Annual Congress (Spring).
http://www.tuat.ac.jp/NEWS/2014/20140523_01.html
Risk Predictive Braking with Collision Avoidance in Intersection Right Turn Maneuver
This research focuses on the intersection right-turn scenario where an object darts out from blind spot of a congested oncoming traffic at the intersection. In such scenario, due to physical friction limit, collision may not be avoided by emergency braking of a driver or an active safety function such as Autonomous Emergency Braking System (AEBS). For improving safety under the limited physical friction potential, the main objective of this research is to develop a risk predictive right-turn assistance system by predicting the potential oncoming object to reduce the vehicle velocity in advance. The blind corner can be detected by on-board sensors without requiring information from infrastructure. The intersection right-turn assistance system is developed and it is evaluated that the system effectively decelerates the ego vehicle to a safe velocity that enables to avoid conflict by AEBS in the emergency cases.
- A part of the results of this research received the FAST-zero’ 17 (4th international symposium on future active safety technology towards zero-traffic-accidents).best paper award.

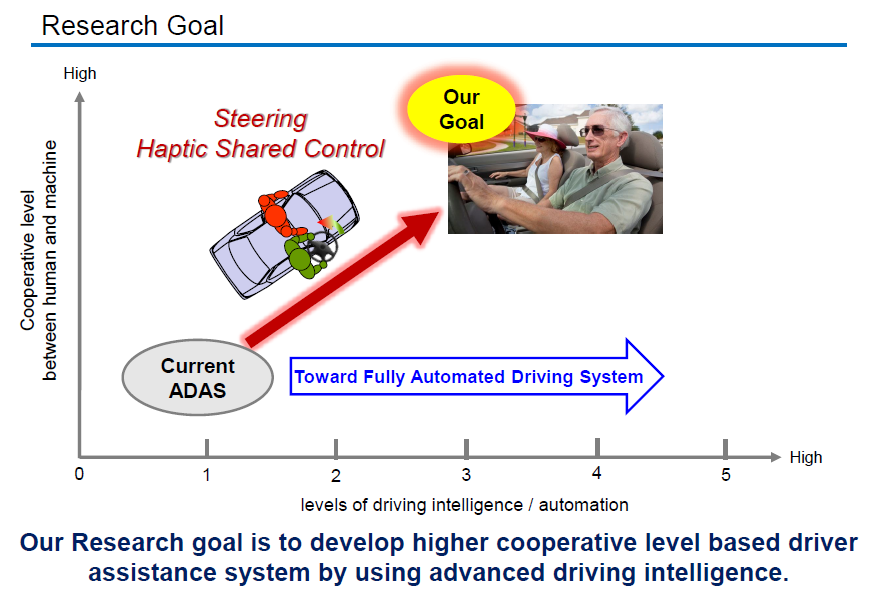
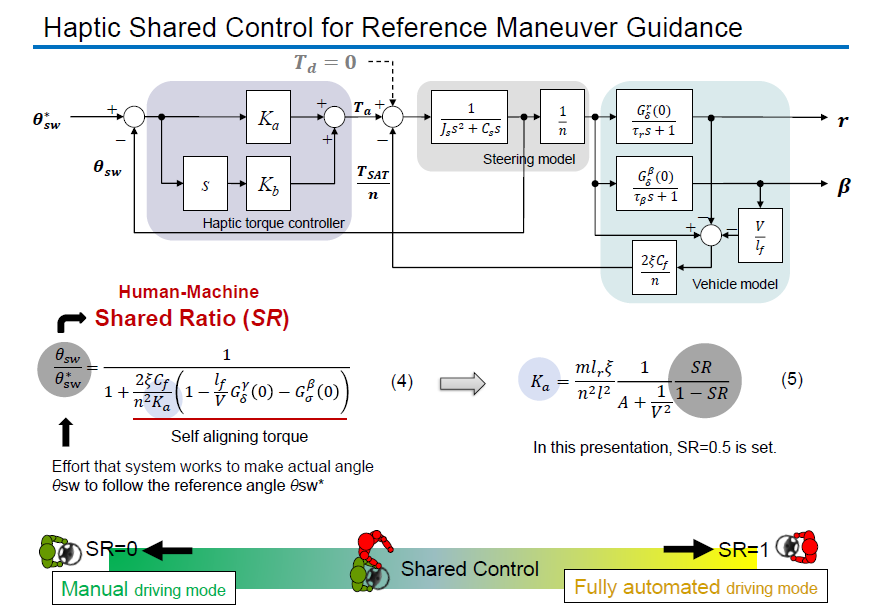
Shared Control
Shared control between a human driver and a machine is an important issue of human-centered automated driving technology. This research proposes a new shared control system which combines haptic steering control torque together with velocity control in order to conduct stable and appropriate operating guidance resulting in the same way of an expert driver. This system has two following features. The first feature is a reference driver model which calculates the reference steering wheel angle and acceleration/deceleration command simultaneously by using sequential reference path curvature generation. The second feature is the haptic shared control torque controller in which the intensity of the haptic control torque gain are adjusted by using the key concept of the shared ratio (SR). The effectiveness on lane keeping assistance by reference driving maneuver haptic guidance is verified by conducting the driving simulator experiment.
- A part of the results of this research received the best paper award at the 14th International Symposium on Advanced Vehicle Control (AVEC2018).
Preview Suspension Control
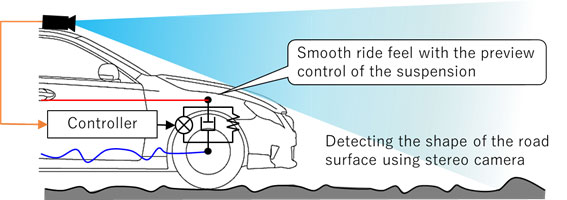
Suspension Control and Road Preview Sensing
This research proposes a real-time road surface profile estimation method ahead of the vehicle using a stereo camera for preview suspension control. The Performance of suspension control system can be enhanced significantly with the information of road surface profile preview. We verified the estimation accuracy of road surface profile using the proposed image processing method and the test drive shows that the ride comfort can be improved by preview semi-active suspension control system.
- A part of the results of this research received the Presentation Award at the 21st Intelligent Mechatronics Workshop (IMEC2016).
- A part of the results of this research received the Award (2018 JSME Transportation and Logistics Division, Certificate of Merit for Paper and Presentation).
http://www.tuat.ac.jp/NEWS/winning/20190315_01.html
Automated Parking for Articulated Vehicle
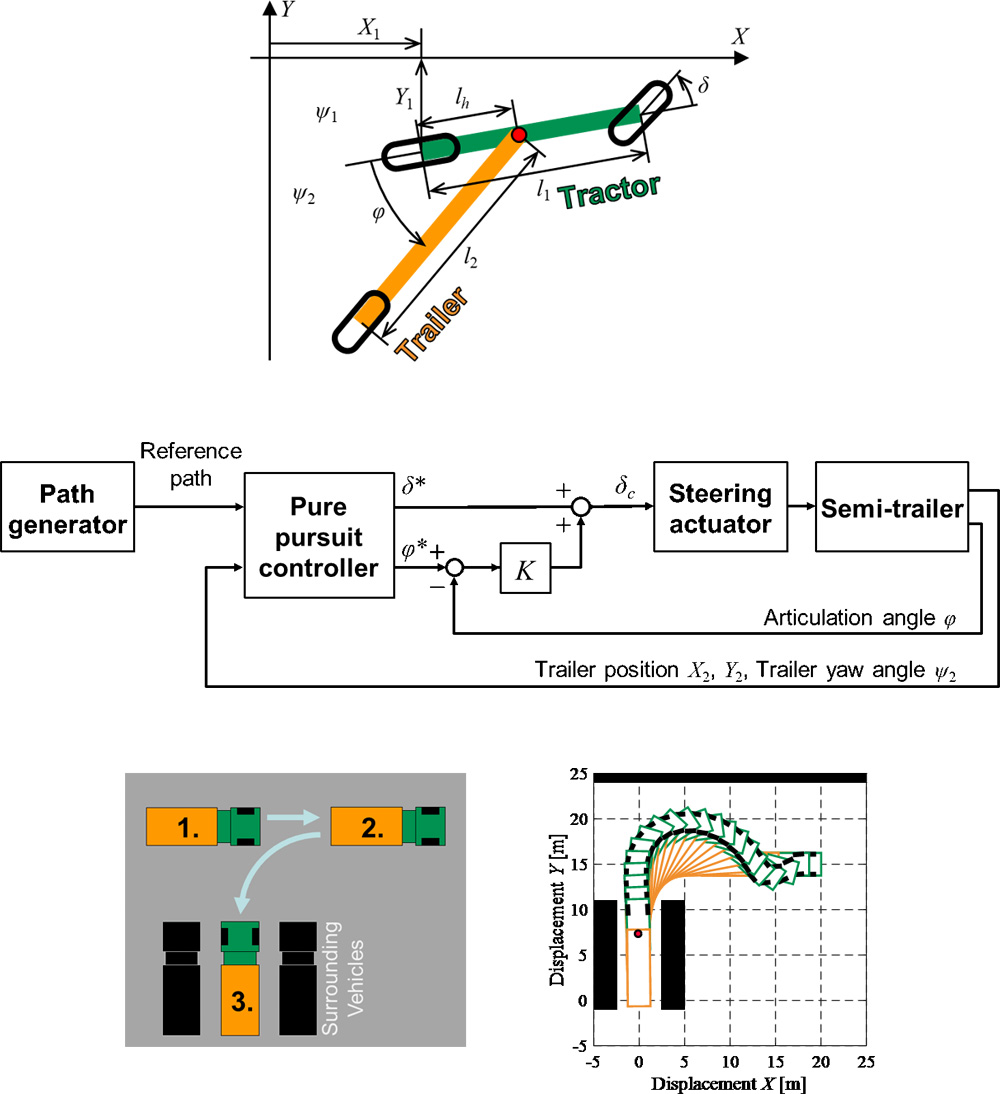
Automated Parking Control for Semi-trailer Vehicles
As the demand for road freight transportation increases, articulated vehicles (semi-trailer) have the advantage that the maximum load capacity is large. However, there are some problems that high driving skill is required because it is necessary to perform unique steering during backward parking. This research proposes the concept of the parking assist system and path tracking controller. The control system consists of a Pure Pursuit Motion Planning method to determine the reference path tracking and a feedback controller for stabilization of the articulation angle. The experiment using an actual semi-trailer vehicle was carried out and the effectiveness of the proposed approach was verified by evaluating the precision of the parking position.
COPYRIGHT ©2019 PONGSATHORN LAB. ALL RIGHTS RESERVED.
Page Top