Low Speed AV (COI STREAM:2013-2021)
Japan Science and Technology Agency (JST) Funded Project
Center of Innovation (COI) STREAM
Vision 3: Establish a Sustainable Society with Vitality
“Mobility Innovation Center – Empowering an Aging Society through Advanced Mobility-“
(Fiscal year 2013-2021)
COI Mobility Innovation Center
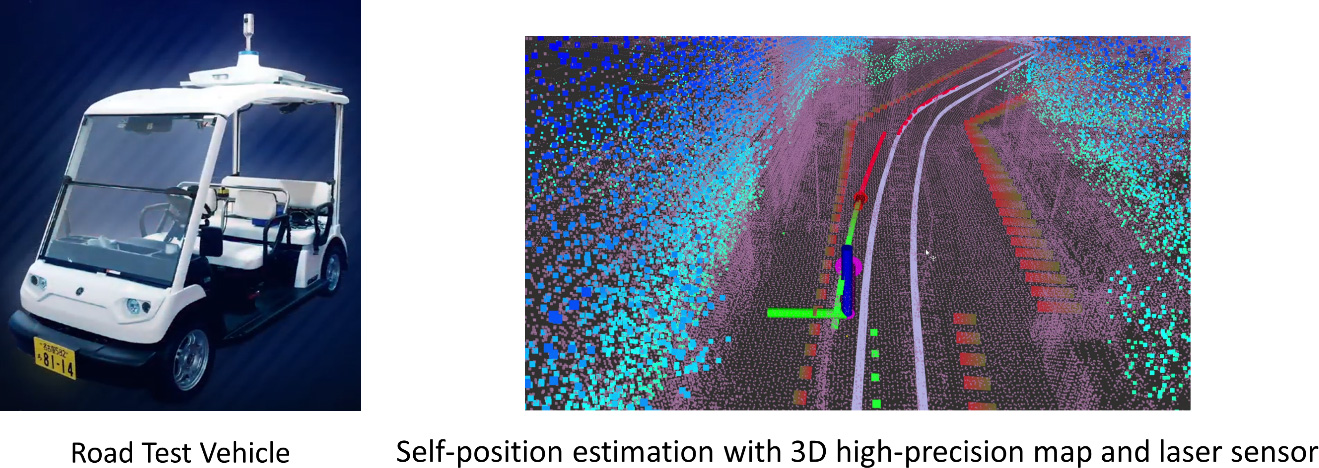
Our laboratory is collaborating with the Nagoya University Center of Innovation, on research related to the topic of “Empowering an aging society through advanced mobility”. As a part of intelligent car research, in order to bring the application of slow self-driving cars at an early date, relevant research is being carried out on the construction of the standard driver model.
In an aging society of Japan, it is important to create an living environment which everyone can spend live actively. Advanced mobility is very important technology for empowering the aging society. The project aims to provide an enjoyable mobility experience even for those who cannot or do not like to drive by implementing the proactive driving assistance system (proactive path planning, speed control, supervisory driver modeling), Slocal (slow and local) automated driving(R), Driver agent, Dynamic Map and Stress-free traffic management system.

Source : Nagoya University Mobility Innovation Center (COI)
Trajectory Planning and Motion Control of Low-Speed Autonomous Vehicle
In recent years, mobility supported by low-speed autonomous driving service has been considered for vulnerable road users. However, driving at a low-speed region might have a problem in disturbing normal traffic flow when such vehicles appear in public roads, and consequently, the social acceptance of such mobility service is not high. Therefore, it is required to detect an approach of rearward vehicles by using sensors and to move the vehicle to a free space where the ego vehicle does not disturb the traffic of normal passenger cars which are driving at a higher speed. In this work, by measuring the brake operation of the rearward car concerning the low-speed vehicle motion in the experiment, the appropriate avoidance start timing is investigated. In addition, an optimal trajectory planning of the ego vehicle in lane-change maneuver is proposed, and the motion control is designed to track the desired path. We generate a smooth evacuation trajectory that minimizes the lateral acceleration when constant deceleration is assumed, and verify its effectiveness by the following simulation using an equivalent two-wheel model or a nonlinear four-wheel vehicle model.

Standard Driver Model Research
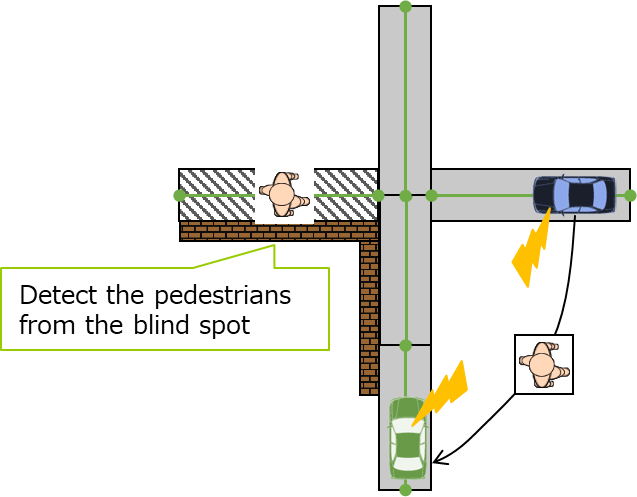
(1)Use Dynamic Maps for Information Sharing
A dynamic map is a framework to attach various dynamic information (vehicle position, traffic jam, weather, etc.) to an ordinary map. By sharing the information of pedestrians detected by sensors mounted on other vehicles on the dynamic map, pedestrians in the blind spot of the ego vehicle can be detected timely.
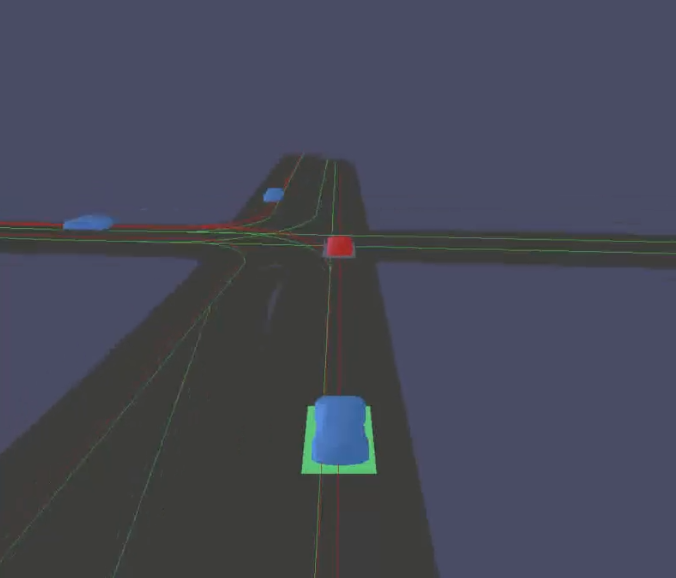
(2)Right-left Turn Merging using Dynamic Map
In order to expand the adaptability of autonomous vehicles in a complex traffic environment, in this work, we proposed a control system for left-right turn merging using the dynamic map.
COPYRIGHT ©2019 PONGSATHORN LAB. ALL RIGHTS RESERVED.
Page Top