Safety Evaluation of Automated Driving Systems
Safety Evaluation of Automated Driving Systems
SAKURA =(Safety Assurance KUdos for Reliable Autonomous vehicles)
The SAKURA project (Safety Assurance KUdos for Reliable Autonomous vehicles) is one of the coordinated initiatives funded by the Ministry of Economy, Trade and Industry (METI) of Japan, under the strategies defined by the Committee on Business Discussions on Autonomous Driving Technologies. This committee was established in February 2015 and oversees All-Japan initiatives by industry, academia and government sectors, including a Roadmap for Deployment of Autonomous Driving Services, demonstration tests and efforts for harmonization areas. SAKURA project has been conducted since mid-2018 until the end of March 2026.
The goal of the project
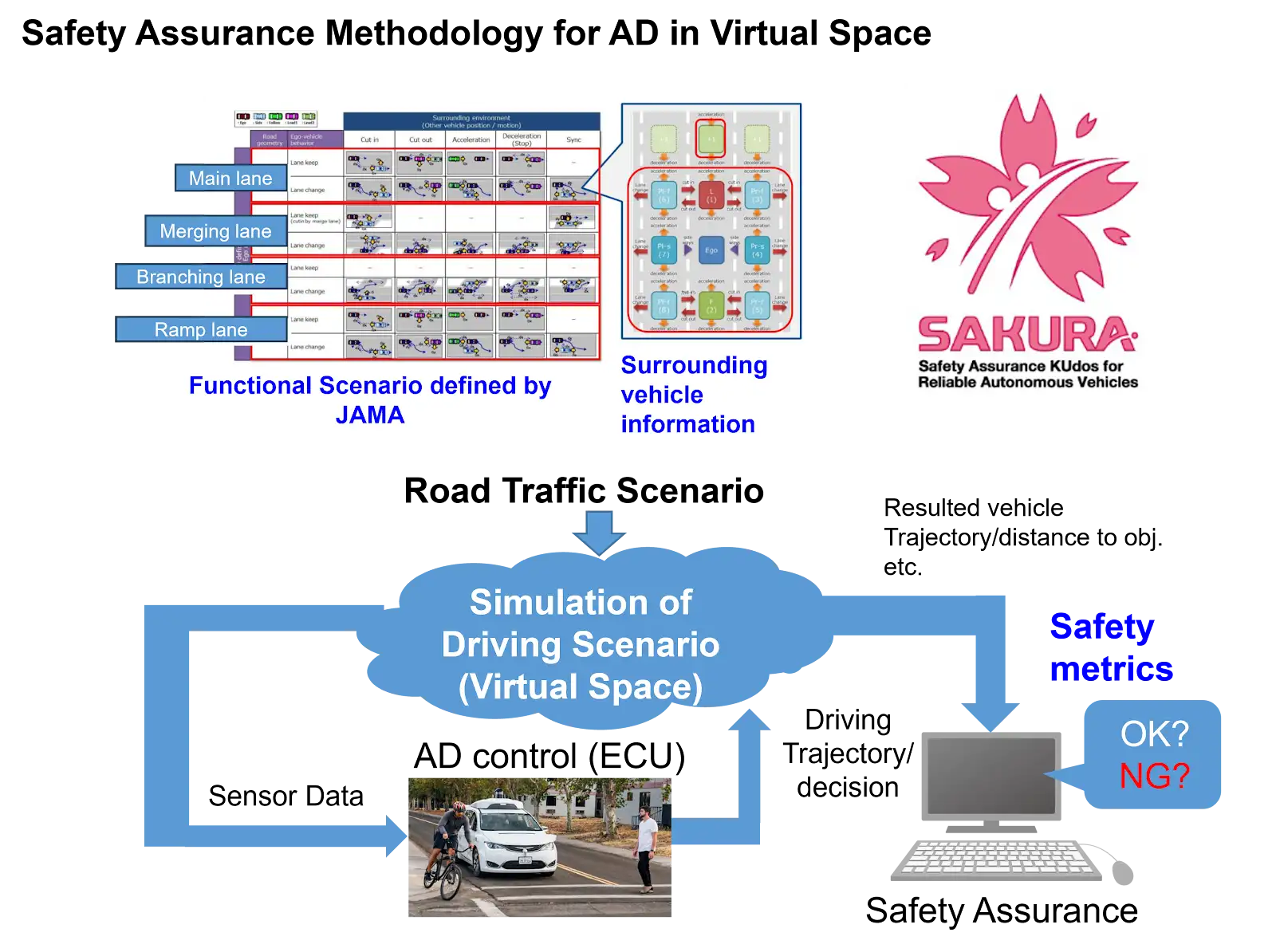
Ensuring safety is the most critical challenge for the practical implementation of automated driving systems (ADS). The fundamental safety principle required for ADS is defined as follows: “Automated vehicles shall not cause any traffic accidents resulting in injury or death that are reasonably foreseeable and preventable within their operational design domain (ODD)”.
On the other hand, since the automated system itself performs “perception, judgment, and maneuver,” there are limitations to safety evaluation through actual vehicle testing on public roads; therefore, driving simulation in virtual environments is highly expected.
The SAKURA project, promoted by the Ministry of Economy, Trade and Industry (METI), aims to establish safety evaluation methods for automated driving and accelerate social implementation through an “All-Japan” collaboration between industry, academia, and government.
In the past, numerous cases have been reported where human drivers avoided collisions through emergency braking or evasive steering in dangerous situations, resulting in only near-miss (or near-crash) incidents. In similar scenarios, automated vehicles such as robotaxis are required to execute collision avoidance maneuvers at a level equivalent to or higher than a careful and competent human driver.
To this end, we are developing “Traffic Disturbance Test Scenarios” that describe the mutual interactions between an automated vehicle and surrounding traffic participants to develop and verify safety evaluation methods for ADS. Tokyo University of Agriculture and Technology is specifically focusing on rear-end, merging/cut-in, crossing-collision, right-turn, and pedestrian scenarios to construct Concrete Scenarios and investigate safety evaluation indicators.
Safety Assessment of Automated Driving Systems Based on Near-Miss Data Using the ACA Index
This study involves the analysis of accident and near-miss cases to validate the parameter ranges of safety evaluation scenarios. It also features a characteristic analysis of driver models that avoid reasonably foreseeable and preventable traffic accidents based on near-miss data, alongside research into collision risk indicators applicable to urban road evaluation scenarios for both vehicle-to-vehicle and vehicle-to-pedestrian interactions.
Specifically, image processing technology was applied to video data from near-miss records to extract motion and environmental parameters for reproducing near-miss scenarios. Furthermore, a risk indicator called Acceleration for Collision Avoidance (ACA) was calculated for these scenarios to evaluate the risk level of each near-miss scene.
The results demonstrated that ACA is effective as a driving safety evaluation criterion for automated driving systems in risk scenarios. In the future, we plan to apply this safety evaluation method using ACA to the assessment of automated driving systems.
References:
Rentaro Kuriyama, Daiki Ikami, Xingguo Zhang, and Pongsathorn Raksincharoensak, “Safety Evaluation of Automated Driving Systems During Right Turns at Intersections Based on Acceleration for Collision Avoidance,” Proceedings of the 26th SICE System Integration Division Conference (SI2025), Hiroshima, Japan, December 10–12, 2025, No. 1C1-14.
Shuta Sato, Daiki Ikami, Xingguo Zhang, and Pongsathorn Raksincharoensak, “Safety Assessment of Intersection Crossing Accident Avoidance Systems Based on Acceleration for Collision Avoidance Index,” Proceedings of the 26th SICE System Integration Division Conference (SI2025), Hiroshima, Japan, December 10–12, 2025, No. 1C1-13.
Takashi Imaseki, Safety Assessment Methodology of Automated Driving Scenarios, Proceedings of FAST-zero’23 Symposium,Kanazawa.
COPYRIGHT ©2019 PONGSATHORN LAB. ALL RIGHTS RESERVED.
Page Top